Gaining productivity in critical areas, improving safety and health of staff, or finding an alternative to hard-to-find personnel?
High levels of autonomous vehicle operation is probably the answer.
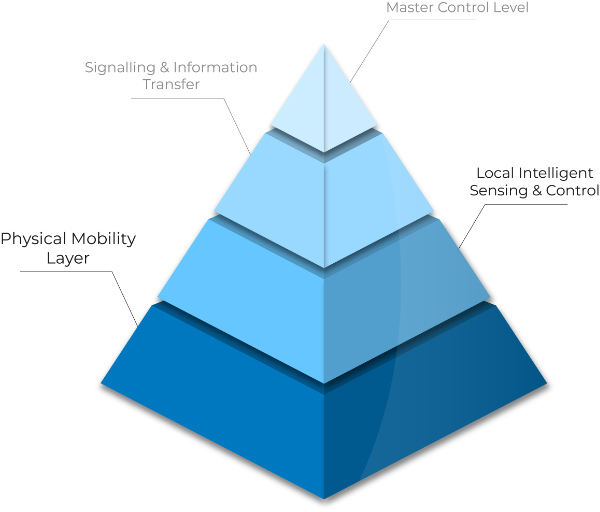
Our vision encompasses highly autonomous mobility both in terms of energy and Power supply as well as local and connected position awareness and automated vehicle operation. While still in the research phase particular for shunting or industrial siding services, we do also see this as part of a more connected system for feeder services.
A first field is developing technology further to improve the use case of shunting in rail operations both at marshalling yards and in the field where the risk profile for shunting personnel is still high and the time and cost share of a trip forms a considerable part of rail operators’ competitiveness issues. The current European initiatives to move towards Digital Automated Coupling in the rail freight sector forms the base of the work which includes vision systems to transmit the field of view to the train operator or an autonomous control system as well as developing solutions for braking and holding railcars.
Besides this we have started to work on studies involving plant internal shuttle transport in e.g. steel works. Having a digital twin of the infrastructure, high precision GPS delivers spatial location with sufficient accuracy, vehicle-based sensor suites and ground-based location and cross traffic transmitters at critical points like level crossings enable detection of mobile hazards. In conjunction with relatively low speeds safe driverless operation is possible for such applications.

Significant improvement of the cost of shunting operations, in particular in the field or at industrial sites is possible if such shunting operations can be done with single hand operations or eventually fully autonomous. To do that requires information about the track ahead of the train or vehicle making sure that obstacles are readily detected, and corresponding action be taken by either the driver or the control system.
We are actively engaged evaluating and developing sensor technology and vision data processing in order to have compact sensor and processor suites suitable for the challenging requirements of off-highway embedded system, e.g. mounting such a system as an integrated module of an enhanced Digital Automated Coupling.
Sensor technologies must deliver reliable information under those conditions even after having been parked at marshalling yards for months in sub-zero temperatures, as can be the case for many types of freight railcars. They need to produce clear images of the track under difficult low light or during challenging weather conditions and must also give a reliable distance information.

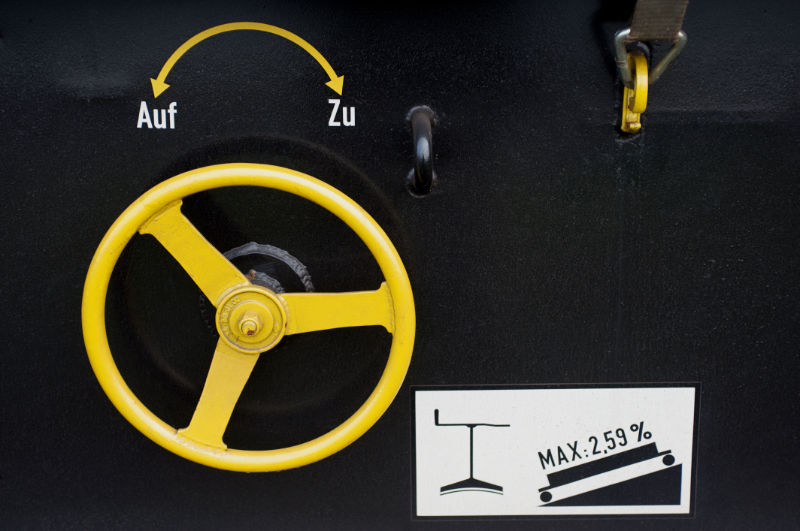
A critical element of autonomous operation is to be able to safely stop and hold an originally moving vehicle either once an obstacle is detected or the pre-planned holding point is reached. In the rail sector this currently requires extensive Infrastructure at marshalling yards such as brake-beam based rail brakes or retarders and additional staff on yards or sidings in the field, manually operating hand brakes or securing the rail car with drag shoes.
But as higher ambition for autonomous operations such as the potential indicated by Digital Automated Couplings will necessarily require each railcar to have an on-board energy source and/or storage new solutions may become an option. If those new options are coupled to a reliable train head vision system, significant benefits for rail operators may accrue.